


Mayrc Industrial
Maytech New 50A MTSPF7.5R Round Shape 50A 75V High Voltage Electric Speed Controller Based on V6 for Robotics ROV Remote Control Lawn Mower Robot
Maytech New 50A MTSPF7.5R Round Shape 50A 75V High Voltage Electric Speed Controller Based on V6 for Robotics ROV Remote Control Lawn Mower Robot
Regular price
$197.82 USD
Regular price
Sale price
$197.82 USD
Unit price
per
Couldn't load pickup availability
Product Details:
1. Specification
| Model No. | MTSPF7.5R | Software | VESC_TOOL Compatible |
| Cont. Current | 50A | Max. Current | 100A |
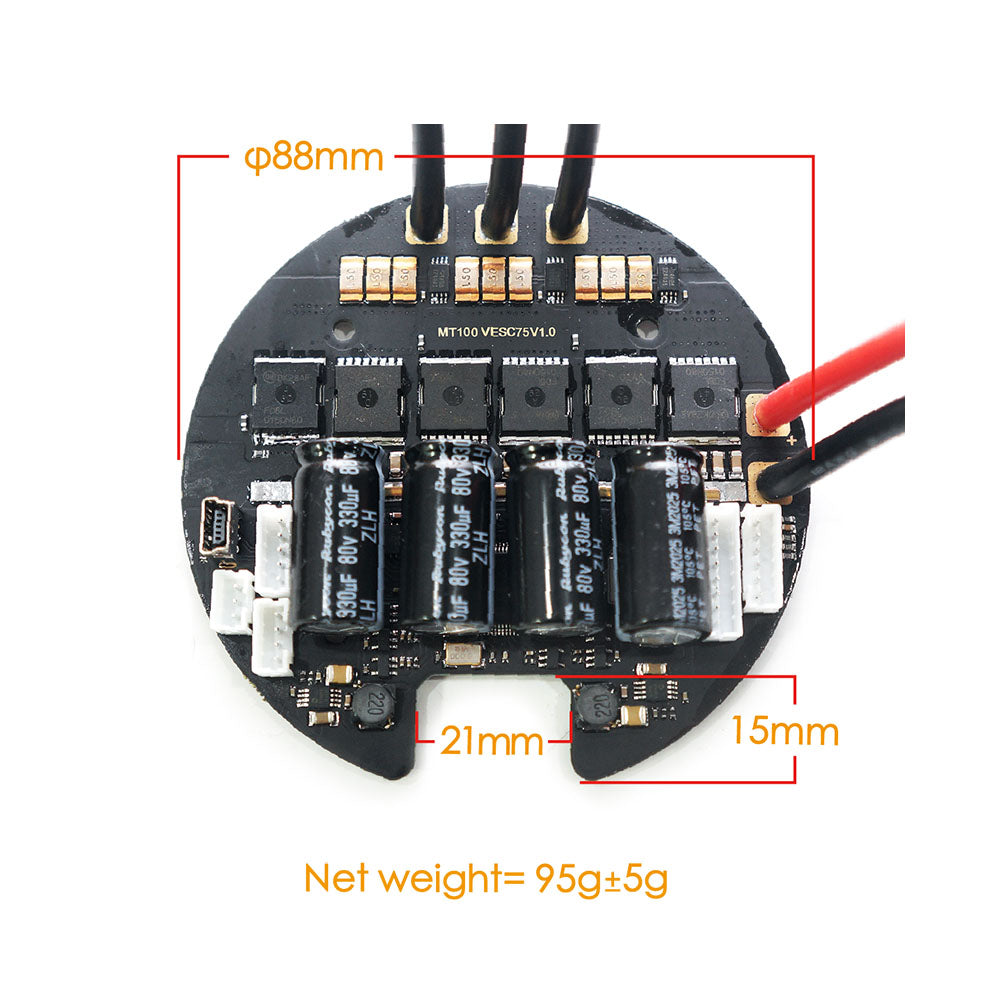
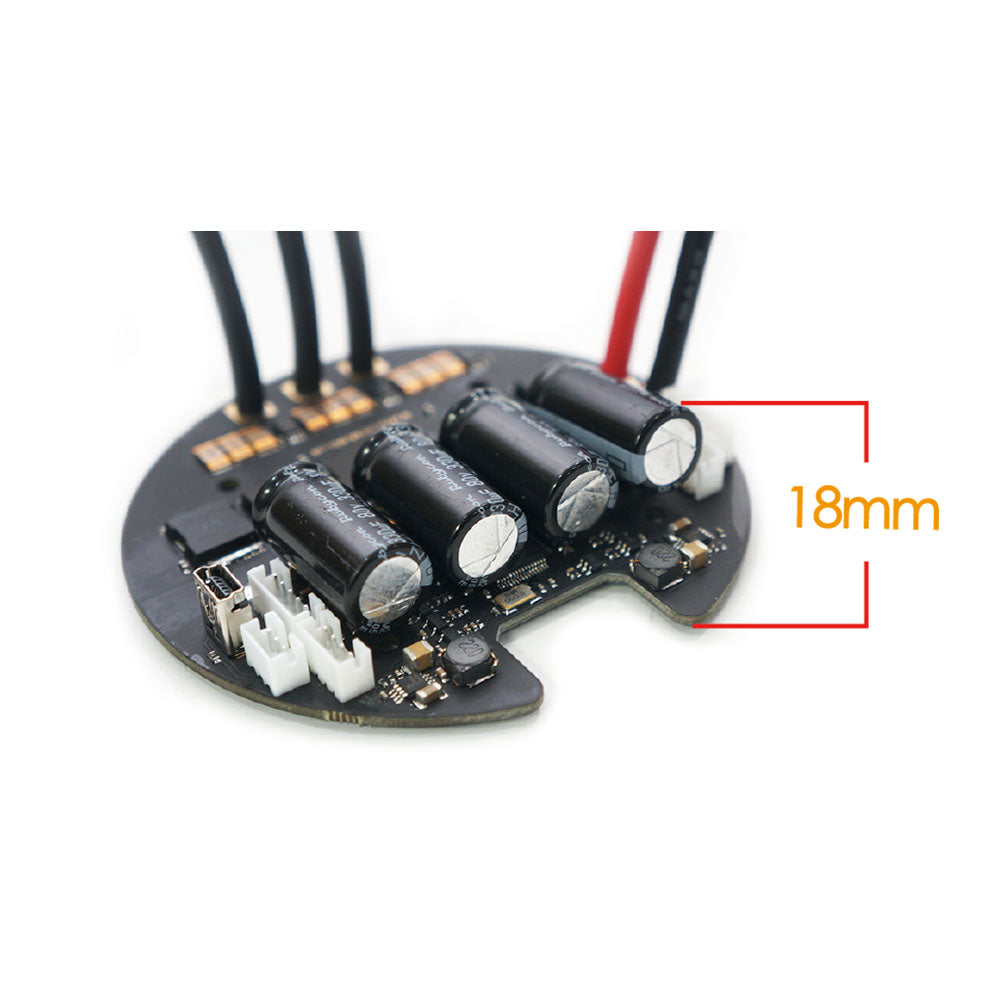
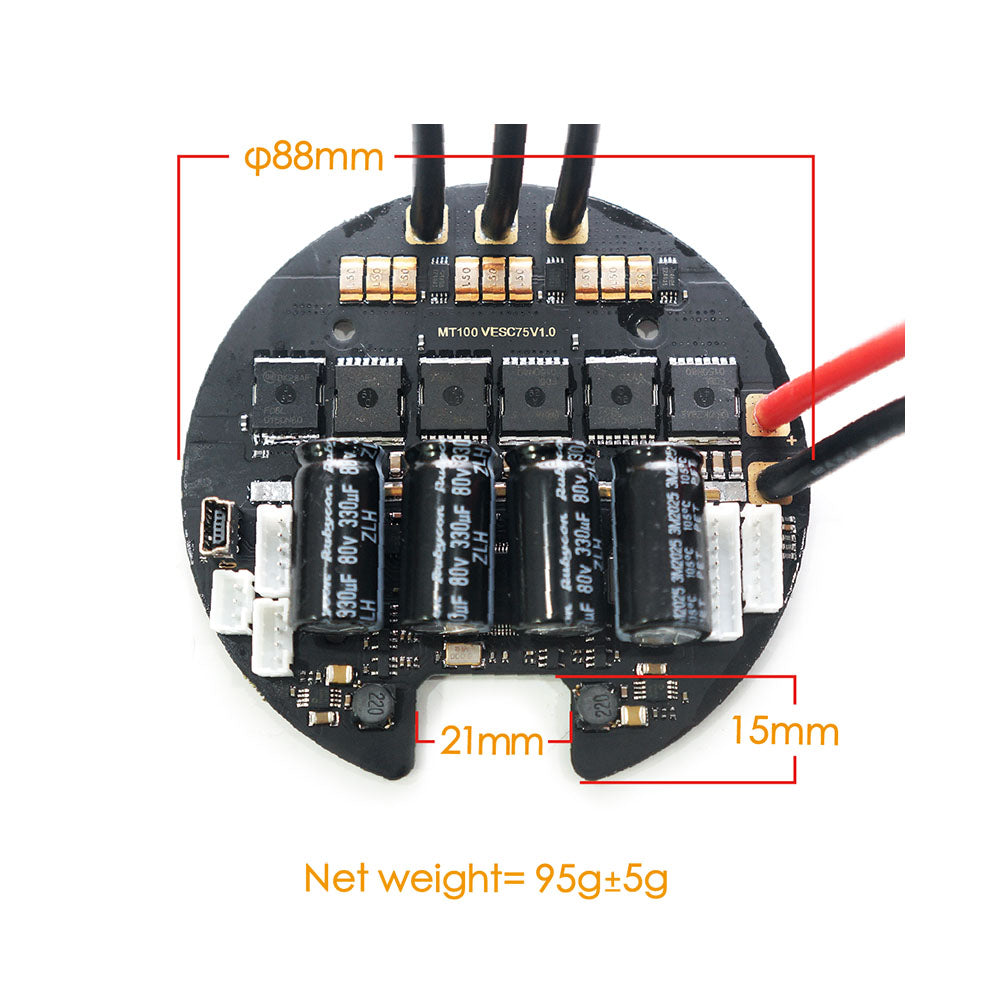
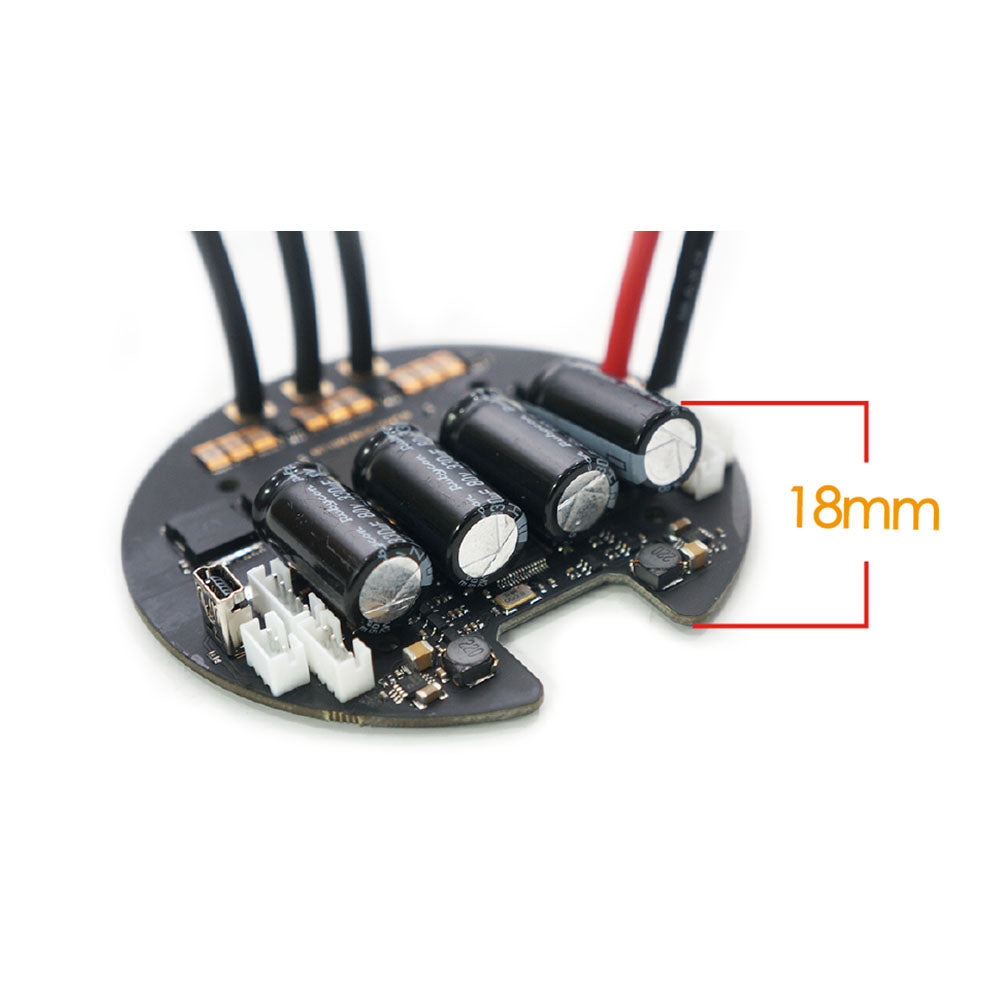
| Input Volt | 75V | Size(round shape) | YES, Round Shape 88mm(D)*22mm(H) |
| Firmware | Updatable | Hardware | Based on V7.5 |
| Weight | 95g | Compatible Motor | Sensored & Sensorless |
| Application | electric skateboard, mountainboard,electric longboard, fighting robot, e-bike, underwater ROV, etc | PCB size | 88mm(diameter)*18mm(height) |
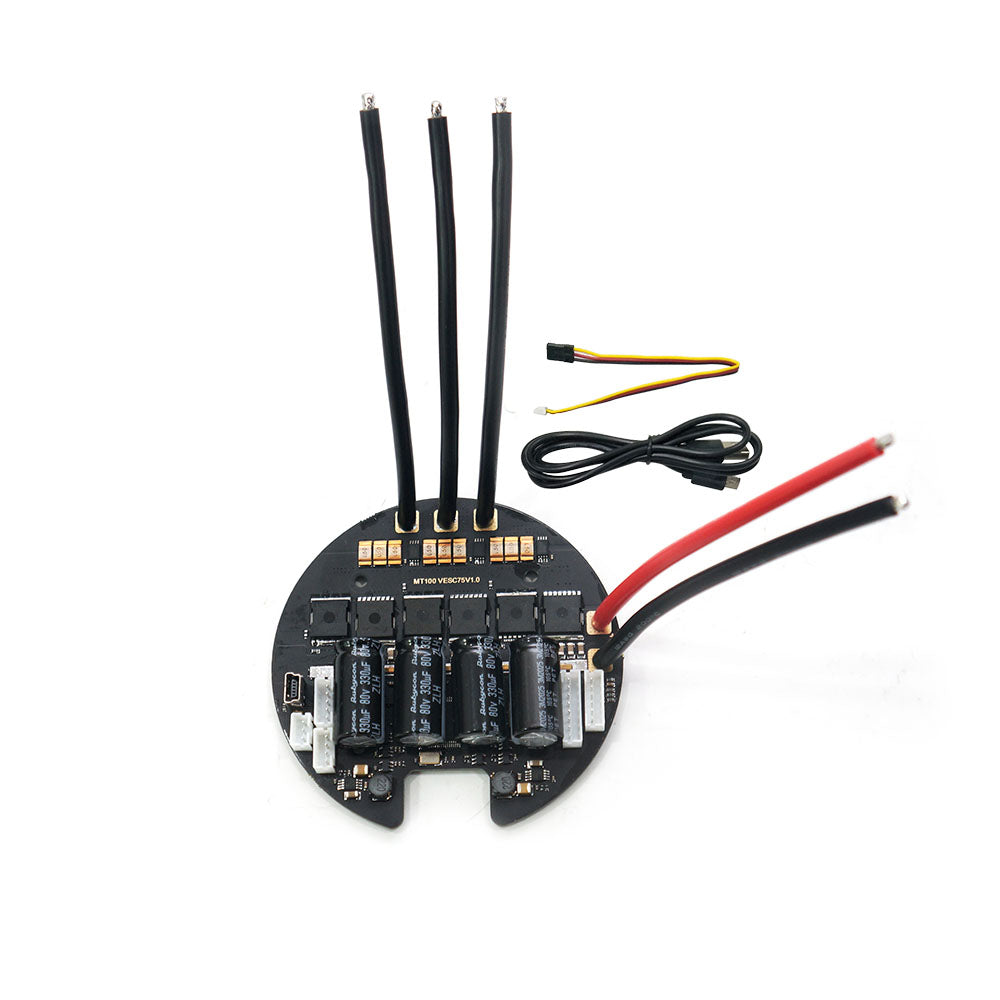
2. Product Details
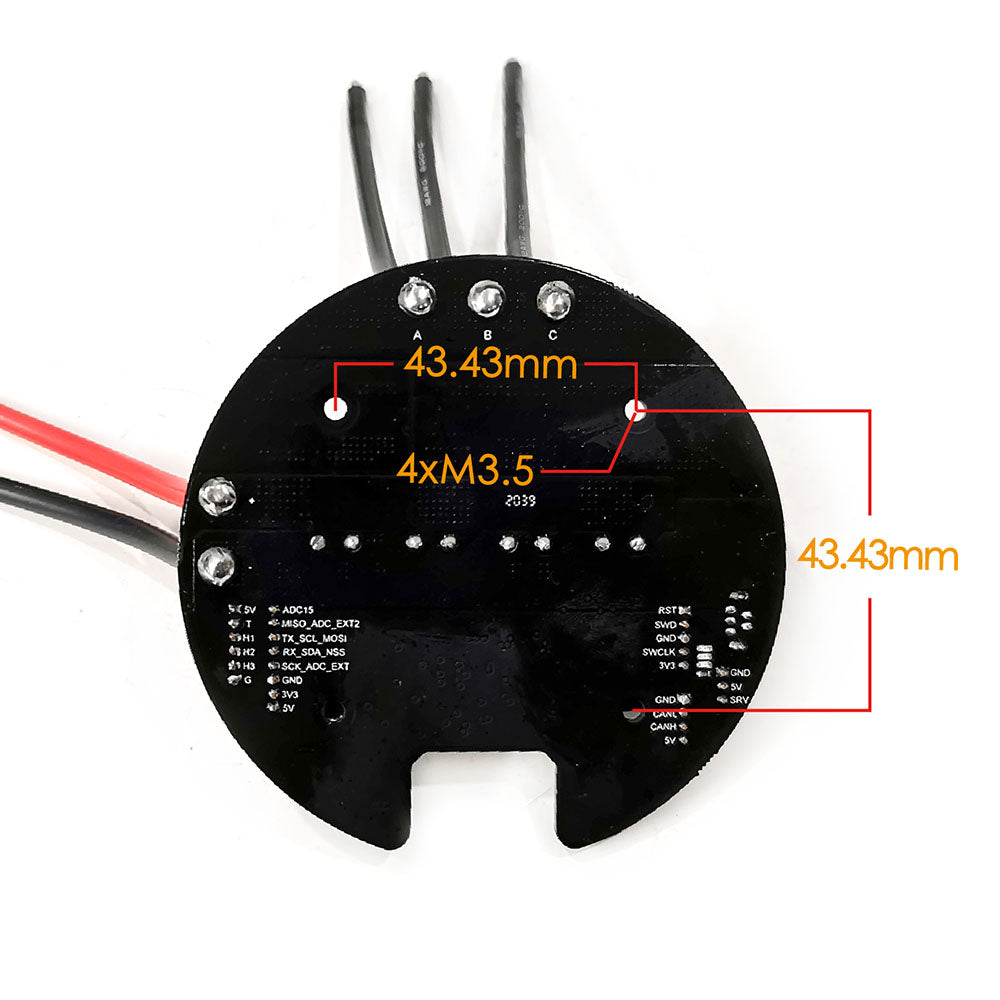
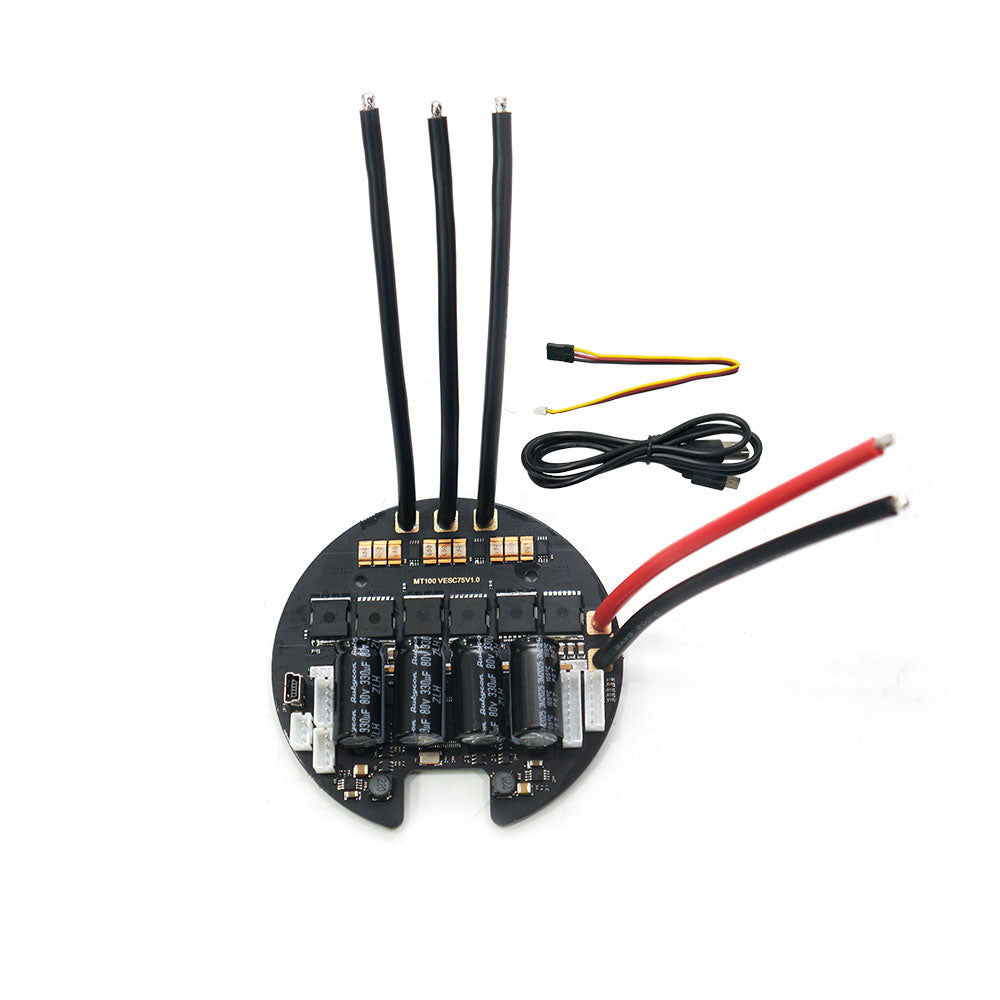
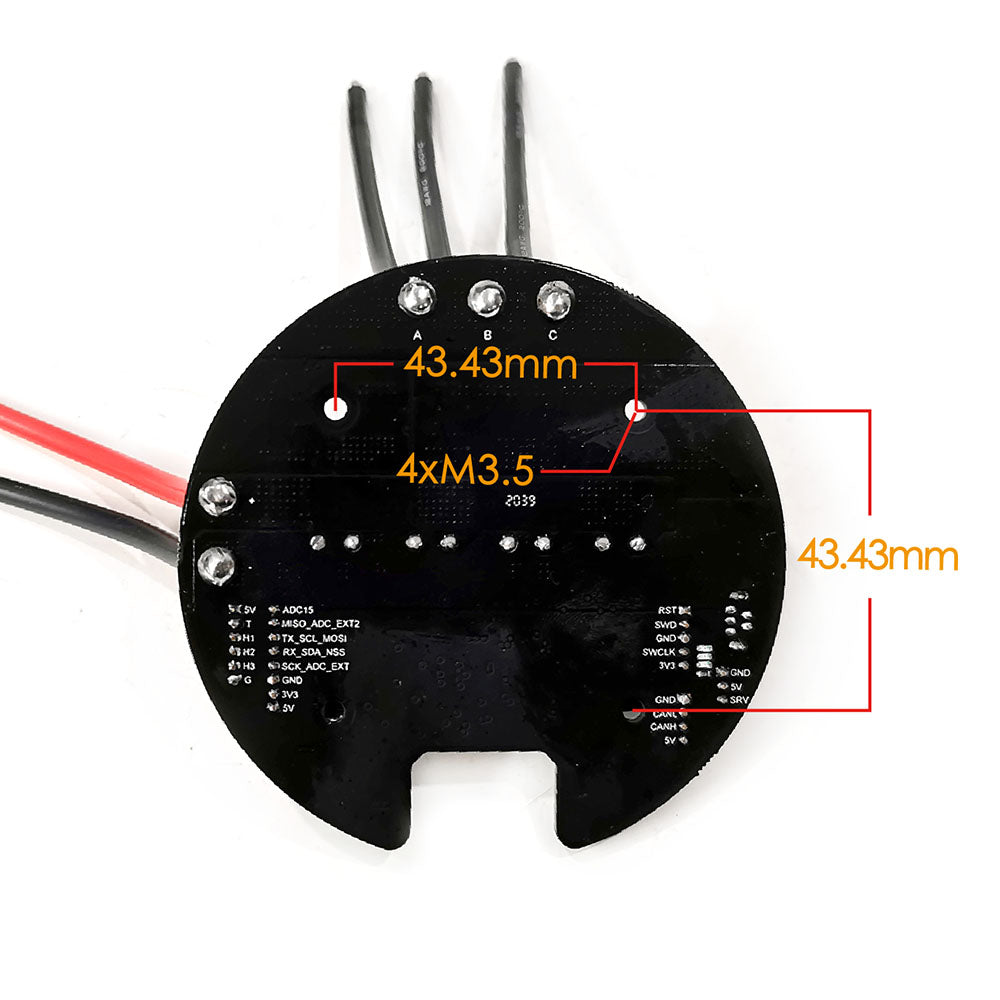
Port definations:
1. USB port for programming;
2. PPM port to connect PPM transceivers;
3. SWD port to get direct access to the Chipset. Diagnostics, debugging, and real time data;
4. CAN Port for CAN communication with other devices and VESC arrays;
5. COMM port for various kinds of other communication methods like I2C, ADC, Uart,You can use your Arduino or Raspberry Pi to control the VESC!
6. Sensor port for motor Hall sensors (ABI, HALL, magnetic precision encoders)


Main Components and Advantages:
*1. PCB layout, size and heat dissipation
*1. PCB layout, size and heat dissipation
It adopts a double-sided 6-layer board layout and a separate design for strong and weak electricity. The
production process is 6x3oz immersion gold.
Increase the MOS copper area to facilitate heat dissipation, and at the same time by adding via holes to conduct heat, the heat is transferred from the metal bottom surface of the MOS to the back surface of the PCB and to the heat sink.Compared with the traditional heat dissipation from MOS resin surface, the thermal resistance is lower and it’s conducive to work in confined spaces.
*2. MOSFET: American Fairchild FDBL0150N80 ( Fairchild, which has been acquired by ON Semiconductor).
*3. Driver IC: American TI company UCC27211.
This chip is also used on MTSVESC7.5H 300A 85V VESC. On 7.5H, the driver IC drives four parallel MOS
without any pressure; while on 7.5R, it only drives one, which is even more fearless.
* 4. Current High-Speed Sampling Chip: American TI Company INA240. It can make the current sampling faster and more accurate, and has a good improvement on the FOC and over-current protection functions.
*5. DC-DC module:
The first stage DC-DC uses TI's LM5161 to convert the main power supply voltage to 12V;
The second level of DC-DC uses Microchip's MCP16311 to convert 12V to 3.3V and 5V.
The current of the two-stage voltage conversion chip is 1A. Considering that the internal circuit needs 100ma, the external output current is controlled within 900ma.
*6. CANBUS interface chip: TJA1051 of NXP Company.
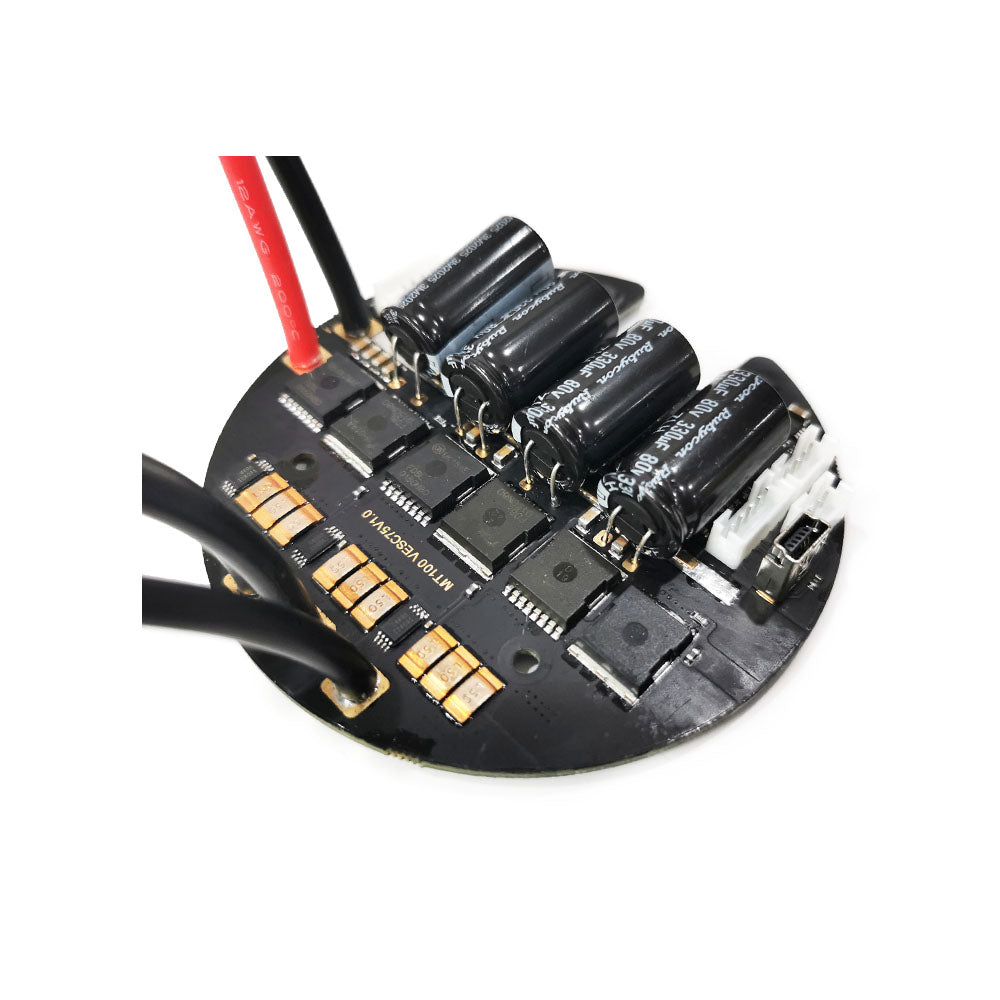
*7. Capacitor: 4pcs Japanese Rubycon ZLH 80V 330uf.
*8. Encoder: This ESC does not integrate the AS5047 encoder chip. If necessary, please purchase the encoder board separately.
* 9. Firmware standard: VESCTOOL automatically recognizes this ESC as 7.5_300. This firmware can be used.
production process is 6x3oz immersion gold.
Increase the MOS copper area to facilitate heat dissipation, and at the same time by adding via holes to conduct heat, the heat is transferred from the metal bottom surface of the MOS to the back surface of the PCB and to the heat sink.Compared with the traditional heat dissipation from MOS resin surface, the thermal resistance is lower and it’s conducive to work in confined spaces.
*2. MOSFET: American Fairchild FDBL0150N80 ( Fairchild, which has been acquired by ON Semiconductor).
*3. Driver IC: American TI company UCC27211.
This chip is also used on MTSVESC7.5H 300A 85V VESC. On 7.5H, the driver IC drives four parallel MOS
without any pressure; while on 7.5R, it only drives one, which is even more fearless.
* 4. Current High-Speed Sampling Chip: American TI Company INA240. It can make the current sampling faster and more accurate, and has a good improvement on the FOC and over-current protection functions.
*5. DC-DC module:
The first stage DC-DC uses TI's LM5161 to convert the main power supply voltage to 12V;
The second level of DC-DC uses Microchip's MCP16311 to convert 12V to 3.3V and 5V.
The current of the two-stage voltage conversion chip is 1A. Considering that the internal circuit needs 100ma, the external output current is controlled within 900ma.
*6. CANBUS interface chip: TJA1051 of NXP Company.
*7. Capacitor: 4pcs Japanese Rubycon ZLH 80V 330uf.
*8. Encoder: This ESC does not integrate the AS5047 encoder chip. If necessary, please purchase the encoder board separately.
* 9. Firmware standard: VESCTOOL automatically recognizes this ESC as 7.5_300. This firmware can be used.


Installation method and dustproof and waterproof:
The standard version is without heat sink case. There are four M3 screw mounting holes on the standard version. If need, Customers need to equip themselves with heat sink and dustproof and waterproof solution when running in high current situations. It is recommended to stick the bottom surface of the ESC (the surface without components) to the heat sink. However, the indicator light on the ESC is on the component-free surface, so customers need to consider the light guide method of the indicator light.
The standard version is without heat sink case. There are four M3 screw mounting holes on the standard version. If need, Customers need to equip themselves with heat sink and dustproof and waterproof solution when running in high current situations. It is recommended to stick the bottom surface of the ESC (the surface without components) to the heat sink. However, the indicator light on the ESC is on the component-free surface, so customers need to consider the light guide method of the indicator light.
The second version comes with a CNC aluminium case. There are mounting holes on the case and the surface components can be filled with glue (as far as possible, the customer can do it by themselves. We will charge for it if we make waterproof treatment). All components except capacitors and pins are IP66 waterproof. For the waterproof of the pins, Customers need to confirm which pins need to be connected, and potting out the pins that are not connected. The LED indicator is placed on the side of the case.
The above tips are only suggestions based on the experience of our engineers. how to actually operate is up to you. Parameters for different setup is also different, please noted.
3. Tips
- When you receive the VESC, please test without load and do not connect motor, first check if the VESC can successfully connect to your computer, if ok, then connect to motor and you can start to adjust parameters.
- Do not use switching power supply, the instant voltage when switching power supply connect to VESC is very high, which would easy damage the VESC.
- Do not push the throttle too hard when test without load, gently and slowly speed up.
- Be cautious when adjust parameters, if parameters set mistake, would also easy damage the VESC.
- Please must remember to change to corresponding modes when you adjust parameters. For example, the VESC default mode is BLDC mode.If you want to detect FOC mode and adjusted FOC parameters, please change to FOC mode. Or the VESC would easy to burn.
-
For V6 in FOC mode, ERPM can't over 50000, otherwise driver IC would easy to be damaged.
ERPM= motor pole pairs number * KV * Voltage - If you use UART port, the wire better do not over 0.5m or even shorter, and better use Stranded wire.